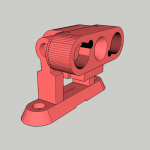
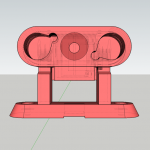
 La tourelle cache la caméra Raspberry PI ainsi que ses 2 projecteurs infra-rouge. Cette camera renvoie une photo au pilote à chaque commande correctement exécuté par le rover.
La tourelle cache la caméra Raspberry PI ainsi que ses 2 projecteurs infra-rouge. Cette camera renvoie une photo au pilote à chaque commande correctement exécuté par le rover.
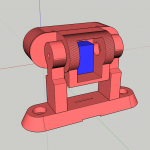 Un mini servo-moteur oriente la tourelle en tilt (axe pitch). Nous voulions utiliser cette camera à la fois en marche avant et en marche arrière, mais la course du servo-moteur légèrement inférieur à 180° nous oblige à choisir un des 2 modes.
Un mini servo-moteur oriente la tourelle en tilt (axe pitch). Nous voulions utiliser cette camera à la fois en marche avant et en marche arrière, mais la course du servo-moteur légèrement inférieur à 180° nous oblige à choisir un des 2 modes.
 Grace à la centrale inertielle, il nous est possible de garder la tourelle continuellement axée dans la direction choisie, et ce, quelque soit l’inclinaison du rover.
Grace à la centrale inertielle, il nous est possible de garder la tourelle continuellement axée dans la direction choisie, et ce, quelque soit l’inclinaison du rover.



Idéalement, nous aimerions streamer en permanence la vidéo de cette caméra. Mais nous sommes confronté à un problème de décalage entre « ordre envoyé » et « confirmation visuel de l’exécution ».
A l’heure actuelle, on constate un décalage de 11s entre ordre et confirmation. Pour que le navigation soit d’une fluidité acceptable, il faudrait rester en dessous de 4s max. Il faut trouver le bon compromis entre qualité/décalage/volume/débit Si vous avez des connaissances techniques en codec vidéo et/ou une expérience dans le domaine du streaming à base de Raspberry PI …. vos conseils sont les bienvenue.
[stl file=”stl/raspicam.stl”]
Soyez le premier à commenter